یک گروه تخصصی در دانشگاه ویرجینیا تک به سرپرستی محقق ایرانی، موفق شدند سیستم شبیهسازی رفتار طبیعی حیوانات را در رباتها توسعه بدهند.
به گزارش حکیم مهر به نقل از آنا، یک گروه تخصصی در دانشگاه ویرجینیا تک به سرپرستی محقق ایرانی، موفق شدند سیستم شبیهسازی رفتار طبیعی حیوانات را در رباتها توسعه بدهند.
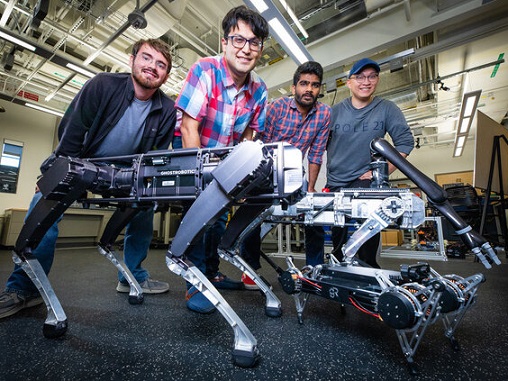
سگهای رباتیک نسبت به چند سال قبل پیشرفت قابل قبولی داشتهاند. این گجتها حتی قادر به رقص و جستوخیز هستند اما کماکان در انجام طبیعی حرکات ناکام ماندهاند و حالا دانشگاه «ویرجینیا تک» برای رفع این مشکل ادغام کرده است که سرپرست گروه تحقیقاتی آن بر عهده یک ایرانی است.
«کاوه اکبری حامد» فارغالتحصیل رشته مهندسی مکانیک دانشگاه صنعتی شریف که فوق دکتری دانشگاه میشیگان را در کارنامه خود دارد نزدیک به یک دهه را صرف توسعه الگوریتمهایی کرده است که حرکات سگ رباتیک را تا حد امکان به حیوانات نزدیک میکند.
این گروه تحقیقاتی درحالتوسعه ترکیبی از الگوریتمهای پیچیده و حسگرها است که امکان راه رفتن شبیه حیوانات را به رباتها امکانپذیر میسازد. کنترل تعادل در مهرهداران تا حد زیادی ناشی از نورونهای نوسانگر در طناب نخاع است و سیستم ابداعی ویرجینیا تک هم رفتار مهرهداران را بر همین مبنا شبیهسازی میکند.
محققان بدین منظور حسگرهای انکودر برای خواندن موقعیت نسبی مفاصل و واحدهای اندازهگیری اینرسی باهدف اندازهگیری چرخش بدن به نسبت زمین را باهم ترکیب کردهاند. نتیجه کار سگی مکانیکی است که راه رفتن، یورتمه و دویدن را با سرعت و ظرافت بیشتری نسبت به نمونههای مشابه انجام میدهد.
این سگ رباتیک برای جلوگیری از تصادف با اشیاء به حسگرهای لیدار و چندین دوبین مجهز شده. هرچند نتایج اولیه پروژه بسیار امیدبخش بوده اما تا نهایی شدن پروژه هنوز زمان زیادی باقیمانده است.